
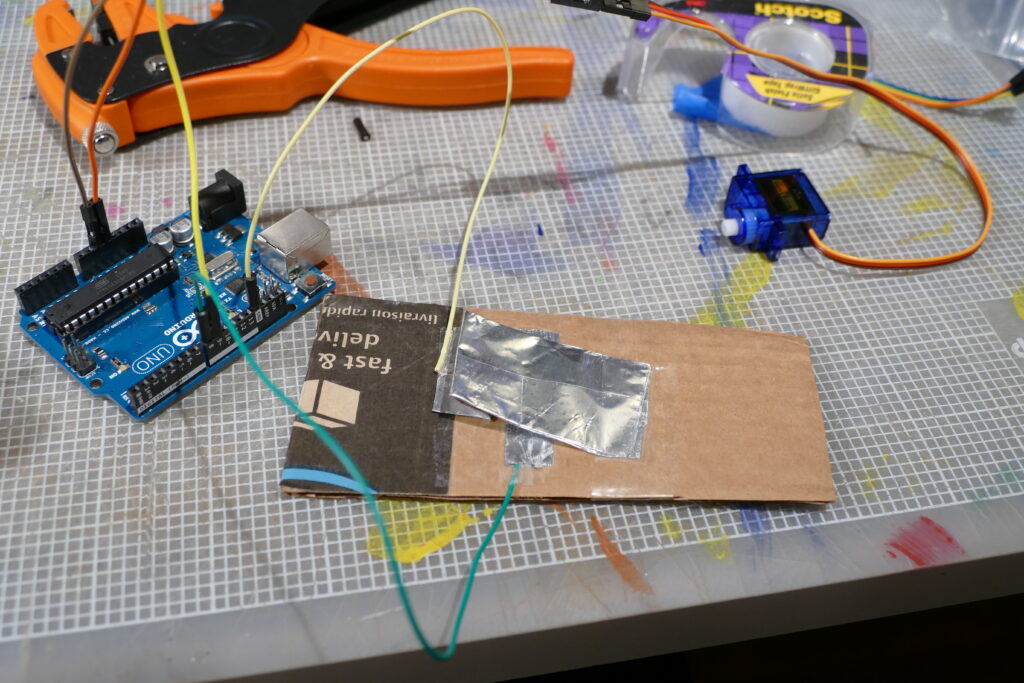
This is a robot I put together for a first-year engineering design course at UBC. It’s made of a sixpack box of pale ale and various crafty supplies, with an arduino, small servo motor, and a sonar distance sensor and DIY limit switch as the brains, brawn, and two eyes respectively.
The robot needed to be capable of picking up small, rounded items like a garlic clove as well as large items like a can. The first thought I had was that the holding torque of the small servo motor we were given was probably not enough to hold up a can without the can falling out, so I decided to base my design on a dual-function concept: one “grabber” mode for smaller objects, and a “sweep” mode that would work similar to a broom and dustpan to hold heavy objects. Here is the design concept:
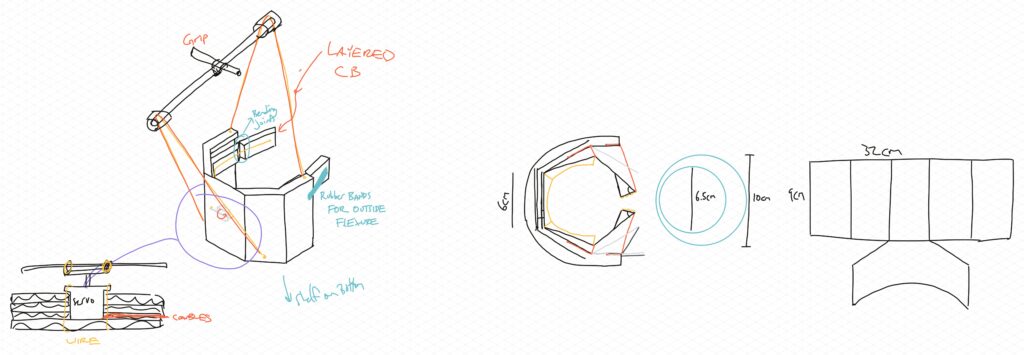
The modes are switched between by holding the puppet-like robot at a different angle. An immediate issue is that we are only allowed to use one sonar distance sensor, so I made my own limit switch for detecting when to close the claws in the “sweep” orientation out of aluminum foil and some jumper wires:
Here’s the execution in pictures and a real-time video showing autonomous function:
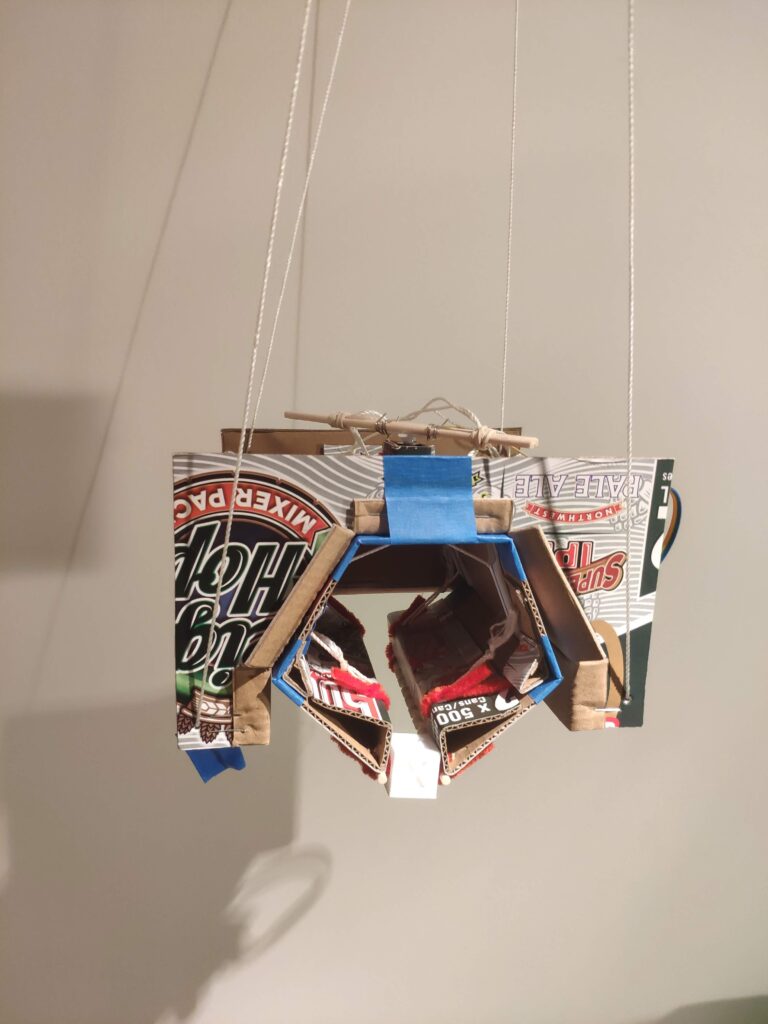
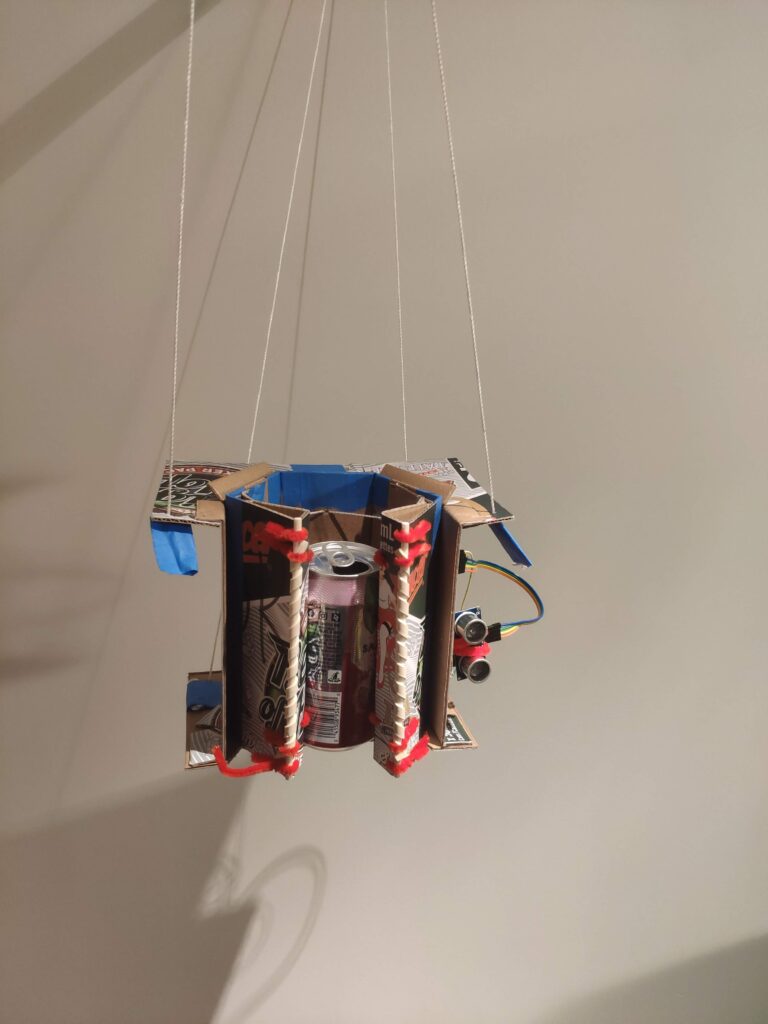

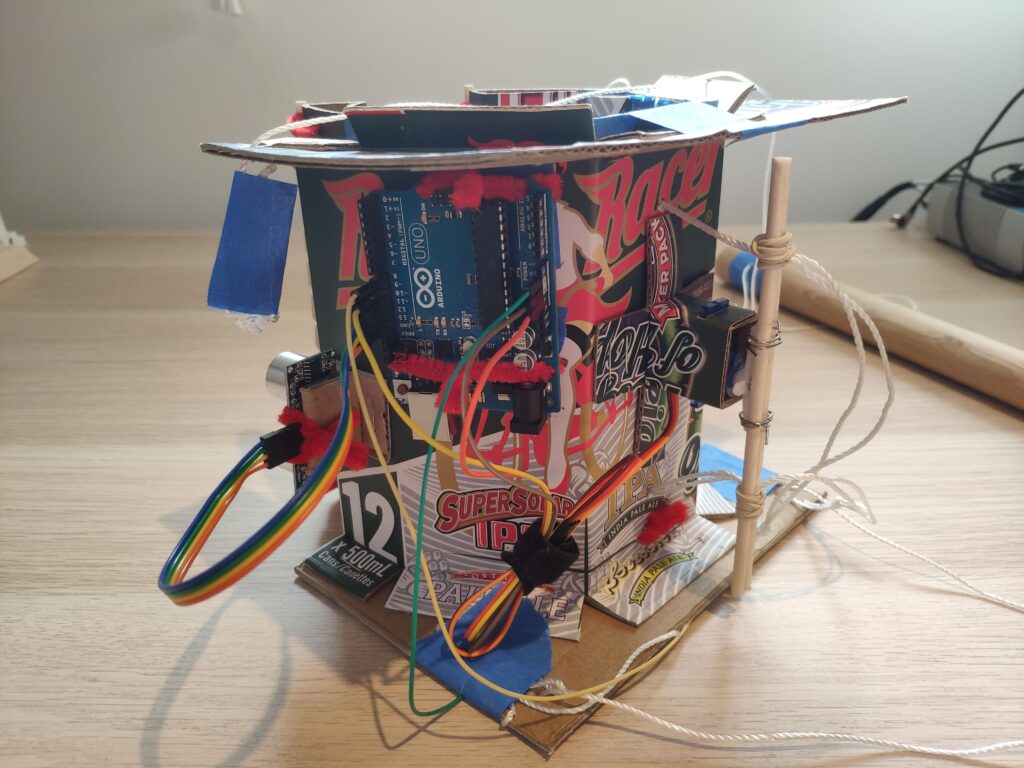
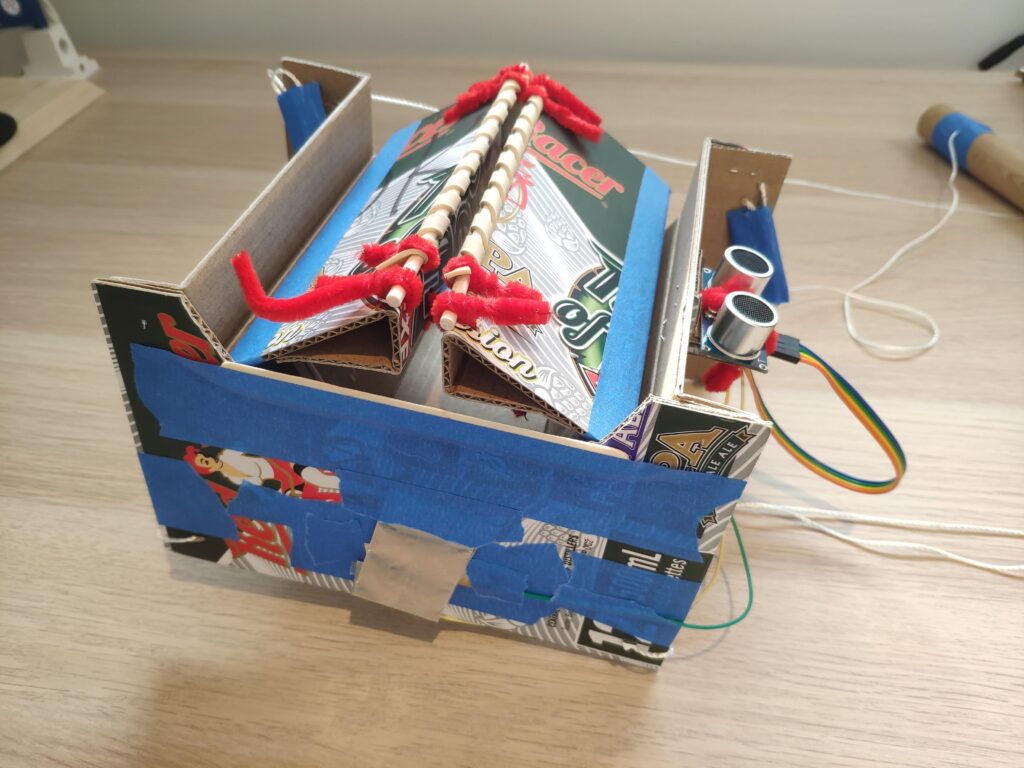
As seen in the photos, the foil limit switch is triggered when the robot is placed flat down on the table, and the sonar handles the claw actuation. The actuation is via the servo with some string tied on and run through some straws along the inside of the claw, creating channels for the contracting motion the string makes, similar to our muscles.
Project Outcomes
Expands
our students’ access to and confidence with MIG and TIG processes
Builds
our shop supervisors’ talents as educators and improves our student body’s collective knowledge and ability as manufacturers
Unlocks
Potential for more ambitious student projects within the IGEN capstone design community
Skills and Learning
•••••
Leading hands-on technical training of 5-10 person groups
•••••
Creating well-documented, clear written curriculum and tests
Leave a Reply